
XDK Ideation Jam se presento a mediados de Julio de 2016, con la finalidad de que entusiastas y profesionales pudieran plantear una idea en concreto sobre el uso del XDK en un ambiente de trabajo ya fuese en tiempo real, o en simuladores, pues bien este evento llegó a su fin, anteriormente ya habíamos platicado sobre él en nuestro artículo XDK, BOSCH reveló su AiO en CPMX7. Sobre las capacidades de este Todo en Uno.
XDK Ideation Jam

Y pues bueno nos dimos a la tarea de localizar la información proporcionada por el ganador del XDK Ideation Jam, Jason Athanasoglou quien con su proyecto Bosch XDK in Industrial Automation se proclamó ganador del primer lugar, su proyecto presentado es uno de los miles de proyectos que están en puerta y que estudiantes, profesionistas y entusiastas de automatizacion, mecatronica, electronica y comunicaciones deberían de tener en mente al momento de idear cómo resolver temas de esta índole utilizando el XDK de Bosch. Pero veamos un poco de lo que Jason Athanasoglou planteó en su proyecto.

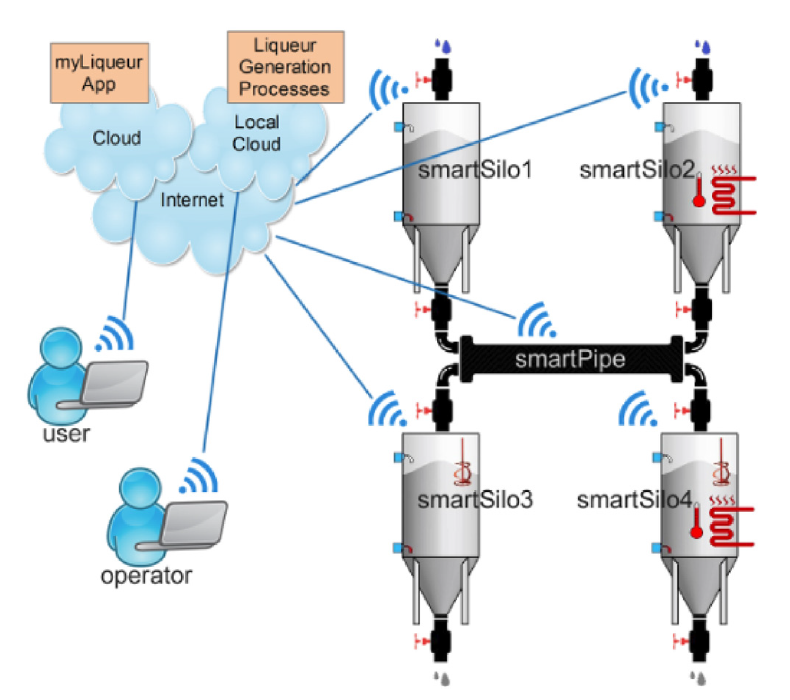
«Nuestro proyecto hace uso de las capacidades de la XDK, para proyectos de internet en Sistemas de Automatización Industrial. Esencialmente, convertimos las unidades mecánicas industriales, tales como válvulas, bombas, cinturones ,los brazos de robot, etc., en objetos inteligentes que pueden ser integrados utilizando la IO para componer el sistema de automatización industrial.»
Como caso de estudio para el XDK Ideation Jam, hemos utilizado dos XDK’s para desarrollar un sistema de producción de licor que aceptará pedidos de licor de clientes a través de la web.
¿Cómo funciona?
Las propiedades de la unidad mecánica que deben exportarse al entorno, ya sea para la detección o accionamiento están conectados a la XDK que actúa tanto:
a) como controlador de la unidad mecánica para convertir la unidad mecánica en un objeto inteligente, y…
b) como cliente – servidor lwm2m, los usuarios del sistema de automatización industrial pueden describir fácilmente a través de la web las características deseadas de los productos que ordenan de la planta. El servidor lwm2m actúa como un controlador de procesos de los sistemas de automatización industrial.
¿Qué problema se estaría solucionando con la aplicación?
…Mediante la transformación de componentes mecánicos de automatización industrial en componentes inteligentes, aumentamos significativamente la flexibilidad, le damos gran capacidad de personalización y un mayor control sobre el sistema industrial.
¿Cómo funciona su idea del lado del software?
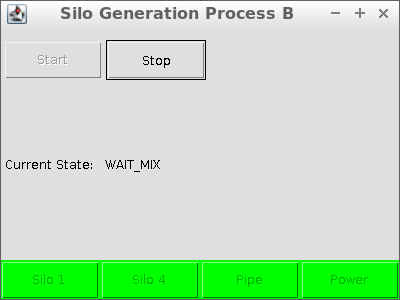
En resumen, nuestro controlador (el XDK) transforma la unidad (silo) en un objeto inteligente. De parte del XDK, creamos una estructura para los recursos lwm2m, que están registradas en el servidor, así como las funciones apropiadas. Durante el tiempo de ejecución, la tarea de lwm2m está funcionando constantemente, a la espera de comandos del servidor. Mientras tanto, otra ejecuta la tarea de estar leyendo los valores de los Pins, el cambio de valores a las variables tales como el estado del silo.
Todo el proceso está en un ciclo, por lo que constantemente se está generando licor. Si se pulsa el botón «Stop» a través de la GUI de control de nuestro servidor, cualquier acción realizada por los silos se detiene inmediatamente y el operador tiene la opción de ejecutar comandos de forma manual o reiniciar el proceso.
¿Cómo funciona la idea del lado del hardware?
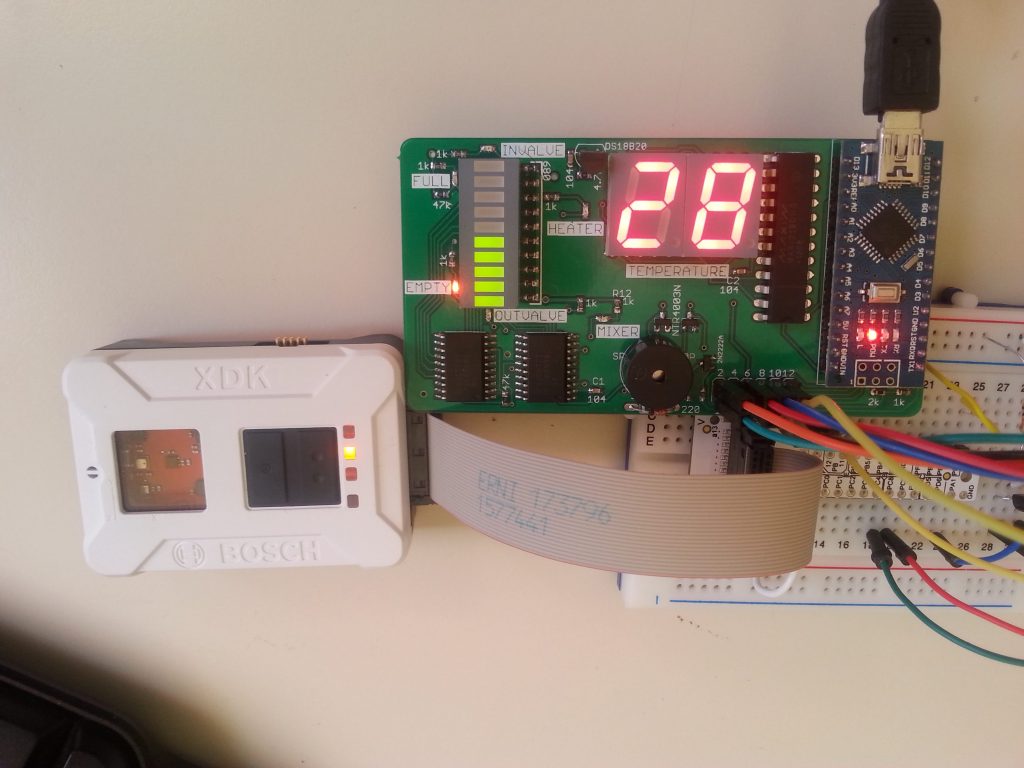
En primer lugar, para transformar un objeto en inteligente, la interfaz de comunicación debe ponerse a disposición de un controlador, dando al controlador la información de estado necesaria y la capacidad de modificar el estado interno del objeto. Además, el propio controlador debe estar preparado para recibir comandos de un servidor y responder a ellos.

«En nuestro caso de estudio, se utilizó un simulador de hardware de Silos, que se ejecuta en cooperación con una placa Arduino Nano. Tiene pines GPIO con el fin de indicar los valores de sus componentes, tales como la detección de líquido, y para habilitar o deshabilitar componentes, tales como las válvulas. Estos pines son para ser conectados al controlador, y funcionan a 3.3V. El controlador del Silo es el XDK, dado que los pines del XDK funcionan a 2,5 V, se utilizó un circuito de desplazamiento de nivel que consta de resistencias y diodos para conectar las patillas de cada silo a la XDK. Nuestro servidor fue probado en un ordenador portátil que ejecuta Linux nativo.»
Pues bien amigos como pueden ver el XDK de Bosch, utilizado en XDK Ideation Jam, tiene muchas cualidades que le proporcionan una amplia gama de soluciones a diversas industrias, y no hay limitaciones hasta el momento para su utilización, por lo que como en su momento comente, aqui el limite es su imaginación. Si tienes deseos y quieres conocer más sobre proyectos planteados o soluciones planteadas para la utilización del dispositivo XDK AiO te invito a visitar la comunidad de Bosch Connectivity donde podrás encontrar respuesta a tus dudas, e incluso ideas para esos proyectos que no terminan de aterrizar.

